

X86 ŽĄĮy╩ŪĮøĄõĄ─ėŗ╦ŃÖCŽĄĮyŲĮ┼_Ż¼Įø▀^┴╦öĄ╩«─ĻĄ─īŹļHæ¬ė├║═▓╗öÓĄ─╝╝ąg ╔²JŻ¼ęč▀_ĄĮ┴╦ĘŪ│Ż│╔╩ņĘĆČ©Ą─┐žųŲąį─▄Ż¼─┐Ū░╣żśI┐žųŲŅIė“Īó╔╠ė├ŅIė“Īó▐k╣½ ŅIė“Īó╝ęė├ŅIė“Č╝┤¾┴┐╩╣ė├╗∙ė┌X86 Ą─ėŗ╦ŃÖCŽĄĮyĪŻć°ā╚═Ōėą║▄ČÓÖCŲ„╚╦┐žųŲŲ„ ę▓╩Ū╗∙ė┌ X86 ŲĮ┼_Ż¼║▄ČÓÖCŲ„╚╦ķ_░lŁhŠ│Īó╣”─▄▄ø╝■ĪóįOėŗ╣żŠ▀Ą╚ę▓Č╝╩Ū╗∙ė┌ X86 ŲĮ┼_╦∙śŗĮ©Ą─Ż¼ę“┤╦Å─×ķ┴╦ØMūŃ▄øė▓╝■Ą─╝µ╚▌ąį║═│ą└^ąįĘĮ├µ┐╝æ]Ż¼čąųŲ┴╦ ╗∙ė┌X86 ŽĄĮyĄ─ÖCŲ„╚╦─ŻēK╗»ė▓╝■ŲĮ┼_ĪŻ
ŪČ╚ļ╩ĮŽĄĮyė╔ė┌Ųõ│▀┤ńąĪĪó┐╔▓├╝¶ąįÅŖĪóķ_░lņ`╗ŅĄ╚╠ž³cį┌╣żśI┐žųŲŅIė“║═ ╔╠ė├ļŖūėĘĮ├µČ╝ęčųØuš╝ō■┴╦ā×ä▌Ąž╬╗Ż¼ī”ė┌ÖCŲ„╚╦┐žųŲČ°čįŻ¼ŪČ╚ļ╩ĮŽĄĮyŽÓī” ė┌é„ĮyÖCŲ„╚╦┐žųŲŲ„ę▓Š▀ėą├„’@Ą─ā×ä▌ĪŻČ°į┌ŪČ╚ļ╩ĮŽĄĮyųą ARM ╠Ä└ĒŲ„Š▀ėąĄ═│╔▒ŠĪóĄ═╣”║─Īó╠Ä└Ē─▄┴”ÅŖĪó═Ō▓┐Įė┐┌ČÓĄ╚╠ž³cŻ¼ęčĮøų▓Į│╔×ķŪČ╚ļ╩ĮŽĄĮyųąĄ─ų„┴„╠Ä└ĒŲ„Ż¼▓╔ė├╠Ä└Ē─▄┴”▌^ÅŖĄ─ą┬ą═ARM Cortex-A8╠Ä└ĒŲ„×ķ║╦ą─Ż¼ĮY║ŽDSP Ą╚Ųõ╦¹╠Ä└ĒŲ„Ż¼įOėŗ┴╦Ęų▓╝╩ĮÖCŲ„╚╦┐žųŲŲ„Ż¼ęį╠ßĖ▀Ųõ┐žųŲŽĄĮyŻ¼ĮĄĄ═┐žųŲŲ„│╔▒Š ĪŻ
ÖCŲ„╚╦─ŻēK╗»ĻP╣ØĮYśŗ╚ńłD2-8╦∙╩ŠŻ¼ų„ę¬░³║¼ęįŽ┬Äū┤¾▓┐ĘųĪŻ
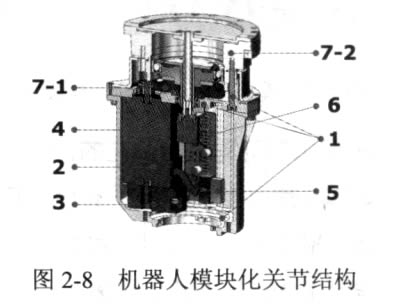
(1)Üż¾w╝░ų¦ō╬ĮYśŗŻ╗
(2)ų▒┴„¤o╦ó╦┼Ę■ļŖÖCŻ╗
(3)ą²▐DŠÄ┤aŲ„(£y╦┘é„ĖąŲ„Ż¼īŹ¼FŽÓī”╬╗ų├ŁhĪó╦┘Č╚Łh);
(4)Į^ī”ŠÄ┤aŲ„(Öz£yĮ^ī”╬╗ų├Ż¼¤ošō╩ŪʱĄ¶ļŖ);
(5)ļŖūėäx▄ćļŖ┬Ę(└¹ė├└^ļŖŲ„▀xō±ąįČ╠┬ĘļŖÖCA/B/C ŽÓ└@ĮMŠĆ╚”Ż¼į┌¤oÖC ąĄäx▄ćĄ─Śl╝■Ž┬īŹ¼Fį┘╔·ųŲäė);
(6)╦┼Ę■“īäėļŖ┬Ę(īŹ¼F╦┼Ę■┐žųŲŻ¼ā╚ų├ļŖ┴„é„ĖąŲ„Ż¼īŹ¼FļŖ┴„ŁhĪó▀^¤ßĪó ▀^┴„Īó▀^ē║/ŪĘē║Ą╚▒ŻūoŻ¼▓óĮė│÷CAN ║═ RS232 ═©ą┼┐┌);
(7)£p╦┘ÖCśŗ┐é│╔(░³║¼│§J£p╦┘ė├²X▌åĮM7-1║═┤╬J£p╦┘ė├ųC▓©£p╦┘Ų„7-2)
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |



