

ūįäė£ń╗Ą─ÖCŲ„╚╦┐ŽČ©ę¬Š▀éõų┴╔┘ā╔ĒŚ╝╝─▄Ż║ ę╗╩Ū░l¼F▓óĮėĮ³╗į┤Ż╗Č■╩Ū┐┐Į³╗į┤ ║¾ė├£ń╗čbų├░č╗į┤Ž©£ńĪŻ
1.└^ļŖŲ„Ą─ū„ė├
Ž╚üĒ┐┤┐┤Ż¼╚ń╣¹ÖCŲ„╚╦ęčĮøšęĄĮ╗į┤┴╦Ż¼æ¬įōį§śė░č╦³Ž©£ńĪŻšfĄĮŽ©£ńŽ×ĀTĄ─čb ų├Ż¼═¼īWéāDę╗éĆŽļĄĮĄ─ĘĮ░Ė╩Ū╩▓├┤─ž?╩Ū▓╗╩Ūė├’L╚ź┤Ą£ń╦³─ž?ø]ÕeŻ¼į┌£ń╗▒╚┘ÉųąŻ¼ Z╚▌ęū▒╗ŽļĄĮė├üĒ£ń╗Ą─čbų├Š═╩ŪąĪą═ļŖ’L╔╚┴╦Ż¼▀@╩ŪZ║åå╬ų▒ĮėĄ─£ń╗ĘĮ░ĖĪŻ╦³Ą─ĮY śŗĘŪ│Ż║å├„Ż¼┐žųŲę▓║▄╚▌ęūŻ¼ų╗ąĶę¬ę╗éĆąĪąĪĄ─ų▒┴„ļŖÖC╝ė╔Žę╗Ų¼╔╚╚~Š═ūŃē“┴╦ĪŻ£ń╗▒╚ ┘ÉĄ─ęÄätę¬Ū¾£ń╗čbų├ų╗ėąį┌ÖCŲ„╚╦░l¼F▓ó┐┐Į³╗į┤Ą─Ģr║“▓┼┐╔ęį▒╗ķ_åóĪŻę▓Š═╩ŪšfŻ¼ ÖCŲ„╚╦Ą─ų„┐ž│╠ą“ę¬į┌ĄĮ▀_Ž×ĀTĮ³Ū░Ą─Ģr║“▓┼┐╔ęį┐žųŲų▒┴„ļŖÖCķ_╩╝▐DäėŻ¼Č°į┌ŲĮĢrąĪ ’L╔╚╩Ū▓╗▐DäėĄ─ĪŻ▀@éĆęÄČ©┬ĀŲüĒ╦Ų║§Š═Ž±ė├│╠ą“┐žųŲę╗éĆķ_ĻPę╗śė║åå╬ĪŻ
ę▓įS═¼īWéāęčĮø┬ōŽļĄĮ┴╦╬ęéāė├ų„┐ž░Õī” LED ąĪ¤¶─ŻēKĄ─┐žųŲĪŻø]ÕeŻ¼ŲõīŹ╬ęéāĄ─ Īż ąĪÖCŲ„╚╦ąĶę¬ū÷Ą─Š═ų╗╩Ūę╗éĆķ_ĻPäėū„Č°ęčŻ¼║═┐žųŲąĪ¤¶▓óø]ėą╩▓├┤▒Š┘|Ą─ģ^äeĪŻĄ½╩ŪŻ¼ ėąę╗³cøQČ©┴╦╬ęéā▓╗─▄ų▒Įė╠ūė├ęįŪ░Ą─└Ž▐kĘ©ĄĮąĪ’L╔╚╔ŽĪŻ▀@éĆįŁę“Š═╩ŪŻ║ūīąĪ’L╔╚Ą─ ų▒┴„ļŖÖC(ūóęŌŻ¼▀@└’╦∙ė├Ą─▓╗╩Ūų▒┴„£p╦┘ļŖÖCŻ¼ę“×ķ▀@└’ŽŻ═¹’L╔╚─▄ē“┐ņ╦┘▐DäėŻ¼Ą½▓ó▓╗ ąĶę¬ėą╠½┤¾Ą─┴”┴┐)▐Däė╦∙ąĶĄ─ļŖ┴„ę¬▀h▀h┤¾ė┌³c┴┴ę╗▒KLED ąĪ¤¶╦∙ąĶꬥ─ļŖ┴„ĪŻČ°ÖCŲ„ ╚╦ų„┐ž░ÕĄ─Č╦┐┌╦∙─▄ē“ų▒Įė╠ß╣®Ą─ļŖ┴„Š═ų╗ėąÄū╩«║┴░▓─Ū├┤ČÓĪŻ╚ń╣¹▌ö│÷Ą─ļŖ┴„┤¾ė┌▀@éĆ öĄūųŻ¼ļŖÖCŠ═ļyęįėą┴”Ąž▐Däė┴╦Ż¼ć└ųžĢr▀Ć┐╔─▄Ģ■įņ│╔ų„┐ž░ÕČ╦┐┌¤²Ü¦Ą─╩┬╣╩ĪŻ╝╚╚╗╚ń┤╦Ż¼ ╬ęéāŠ═▓╗─▄ų▒Įė░čąĪ’L╔╚ĮėĄĮöĄūų▌ö│÷Č╦┐┌╔ŽŻ¼╚╗║¾ė├digitalWrite ║»öĄ┐žųŲ╦³Ą─▐Däė┴╦ĪŻ
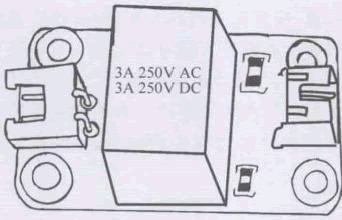
─Ū├┤æ¬įōį§├┤▐k─ž?▓╗ė├ō·ą─Ż¼ėąę╗éĆ║▄ Ū╔├ŅĄ─▐kĘ©┐╔ęįė├üĒ└@▀^┤¾ļŖ┴„Ą─å¢Ņ}ĪŻ─Ū Š═╩Ū╩╣ė├ ę╗ĘNĮąū„└^ļŖŲ„Ą─ļŖūėį¬╝■Ż¼╚ń łD13-1╦∙╩ŠŻ¼üĒ═Ļ│╔ė├Ī░╚§ļŖĪ▒┐žųŲĪ░ÅŖļŖĪ▒Ą─╚╬ äšĪŻį┌╬ęéā▀@ā║Ż¼ų„┐ž░Õ╔ŽĄ─öĄūų▌ö│÷Č╦┐┌╔Ž Ą─ļŖ┴„Š═╩Ū╚§ļŖŻ¼Č°“īäėąĪ’L╔╚║═ų▒┴„ļŖÖCĄ─ Š═╩ŪÅŖļŖĪŻZĮøĄõĄ─└^ļŖŲ„ĮYśŗŠ═╩Ū┐┐╚§ļŖ “īäėę╗ēKąĪļŖ┤┼ĶFüĒķ_║ŽÅŖļŖļŖ┬ĘĄ─ĪŻ
«ö╬ę éāė├ digitalWrite ║»öĄ┐žųŲ└^ļŖŲ„Ą─╚§ļŖČ╦ ĢrŻ¼ļŖ┤┼ĶFŠ═Ģ■«a╔·┤┼ł÷Ż¼╚╗║¾ķ_ĻPŠ═Ģ■į┌┤┼ ┴”Ą─ū„ė├Ž┬╬³║ŽŻ¼ų«║¾ÅŖļŖČ╦Ą─ļŖ┬ĘŠ═Įė═©┴╦ĪŻ▀@śėų╗ąĶę¬ę╗³c³cĄ─ļŖ┴„Ż¼Š═┐╔ęį┐žųŲļŖ ÖC▐DäėŲüĒĪŻłD13-1ųąŠ═╩Ū╬ęéā╦∙╩╣ė├Ą─└^ļŖŲ„─ŻēKĪŻ
└^ļŖŲ„─ŻēKėąā╔éĆĮė┐┌Ż¼3Ė∙ŠĆ─Ū▀ģŠ═╩Ū╚§ļŖČ╦Ż¼ų▒ĮėĮėĄĮų„┐ž░ÕĄ─öĄūų▌ö│÷╔ŽĪŻČ° ā╔Ė∙ŠĆĄ──ŪČ╦ät╩ŪÅŖļŖČ╦Ż¼┐╔ęįė├üĒ▀BĮėų▒┴„ąĪļŖÖCŻ¼▀BŠĆ╚ńłD13-2╦∙╩ŠĪŻėą┴╦└^ļŖŲ„ Ą─Ä═ų·Ż¼į┌│╠ą“åT┐┤üĒ┐žųŲų▒┴„ąĪļŖÖCĄ─▐DäėŠ═║═┐žųŲę╗éĆLED ąĪ¤¶─ŻēKĄ─┴┴£ńø]╩▓├┤ ▓╗═¼┴╦ĪŻ
2.ė├Ī░Å═č█Ī▒░l¼F╗į┤
ÖCŲ„╚╦ėų╩Ū╚ń║╬╚ź░l¼F╗į┤Ą──ž?═¼īWéāČ╝ų¬Ą└Ż¼║▄ČÓ└źŽxČ╝╩ŪėąÅ═č█Ą─Ż¼▀@ą®Å═č█ ┐╔ęįÄ═ų·╦³éāū÷ĄĮšµš²Ą─č█ė^┴∙┬ĘĪŻį┌╬ęéāĄ─šn│╠╦∙ė├Ą─ÖCŲ„╚╦╠ū╝■ųąę▓×ķ┤¾╝ę╠ß╣®┴╦ ę╗éĆĪ░Å═č█Ī▒é„ĖąŲ„Ż¼╚ńłD13-3╦∙╩ŠĪŻ╦³Š═╩ŪąĪÖCŲ„╚╦īŻķTė├üĒīżšę╗į┤Ą─╣żŠ▀ĪŻŲõīŹŻ¼ Ī░Å═č█Ī▒é„ĖąŲ„╩Ūė╔│»Ž“5éĆ▓╗═¼ĘĮŽ“Ą─╝t═ŌŠĆ╠ĮŅ^ĮM│╔Ą─é„ĖąŲ„ļŖ┬ĘĪŻ╗čµ╦∙░l│÷Ą─╣Ō ųą╝t═ŌŠĆ╩Ū║▄ų„ꬥ─│╔ĘųŻ¼ę“┤╦Ż¼╬ęéāė├│╠ą“ūx╚ĪÅ═č█Ą─╝t═ŌŠĆ╠ĮŅ^Ą─╠Į£yųĄŻ¼▓óŪęšęĄĮą┼╠¢ZÅŖĄ─ĘĮŽ“Š═┐╔ęįĄ├ų¬Ž×ĀTŽÓī”ÖCŲ„╚╦Ą─╬╗ų├┴╦ĪŻ
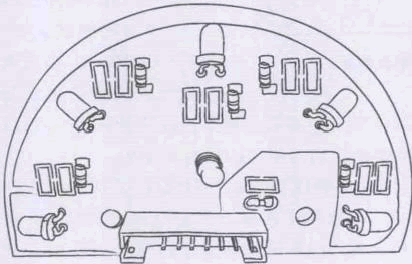
’@╚╗Ż¼Å═č█é„ĖąŲ„╦∙ĘĄ╗žĄ─╠Į£yųĄæ¬įō╩Ūę╗ĮM5éĆ─ŻöMųĄĪŻį┌╩╣ė├ĢrŻ¼ąĶę¬░č╦³▀BĮė ĄĮ5éĆ─ŻöM▌ö╚ļČ╦┐┌╔Ž╚źŻ¼╚╗║¾Ęųäeė├analogRead ║»öĄ½@╚Ī╦³Ą─ūxöĄĪŻį┌ł╠ąą£ń╗╚╬äš ĢrŻ¼ų„┐ž│╠ą“├┐Ė¶ę╗ąĪČ╬ĢrķgŻ¼Š═ę¬╚ź░żéĆ▓ķ┐┤ę╗▒ķ▀@ą®─ŻöM▌ö╚ļČ╦┐┌╔ŽĄ─öĄųĄŻ¼▓óŪę▒╚ ▌^┼ąöÓ──éĆĘĮŽ“╩Ūą┼╠¢ZÅŖĄ─ĘĮŽ“ĪŻČ°╗į┤Š═æ¬įō╠Äį┌ą┼╠¢ZÅŖĄ─ĘĮŽ“╔ŽĪŻ░l¼F╗į┤ ║¾Ż¼ÖCŲ„╚╦┐╔ęįĖ∙ō■▀@ĘĮŽ“ą┼Žó╔·│╔ļŖÖC┐žųŲųĖ┴ŅŻ¼│»ų°╗į┤Ū░▀MĪŻČ°«ö£ń╗čbų├š²Ū░ĘĮ Ą─╝t═Ōé„ĖąŲ„Įė╩šĄĮĄ─ūŃē“ÅŖĄ─ą┼╠¢ĢrŻ¼šf├„╬ęéāęčĮøļx╗į┤║▄Į³┴╦ĪŻ▀@Ģr▀ĆĄ╚╩▓├┤? ūīÖCŲ„╚╦┴ó┐╠╚½┴”ķ_äė’L╔╚Ż¼░čŽ×ĀTŽ©£ń░╔!
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |



